
GSOC 2025 Report: AprilTag, FAST, and ORB Detectors

Aditya Kumar
Published on Mon Sep 01 2025 • 7 min read
This project adds three detection/feature modules to kornia-rs ecosystem: a full AprilTag Detector, FAST Corner Detector, and an ORB Detector. The implementations are CPU-focused, modular, well-documented, and include examples, tests, and benchmarks.
Goals
- Implement AprilTag detection and decoding pipeline (configurable, mult-family)
- Implement newer complete FAST corner detection
- Implement ORB Detector
- Provide examples, tests, and benchmarks; compare to common libraries when possible
AprilTag Detectors
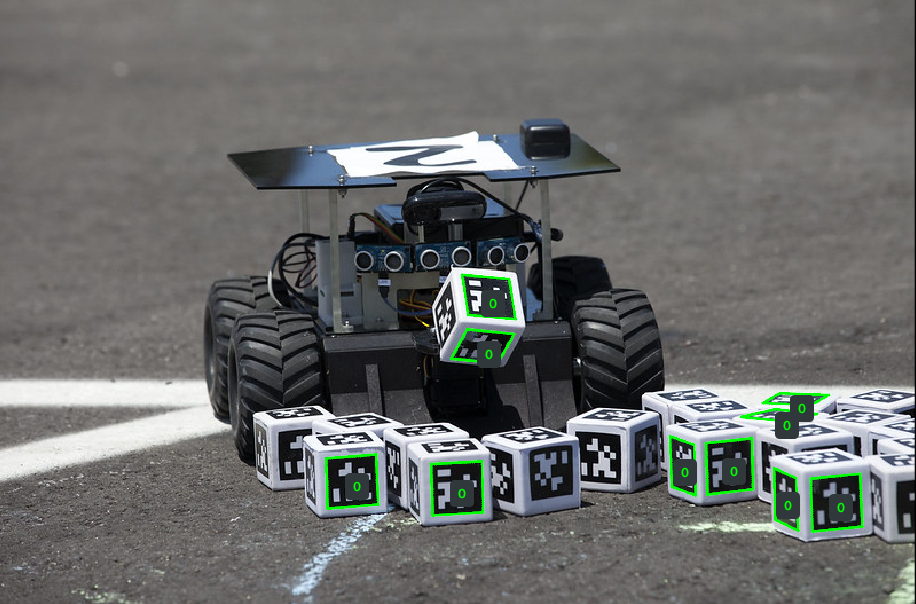
An AprilTag is a fiducial marker: a flat, square pattern that encodes a small binary code inside a black/white border. Once detected and decoded in an image, a tag lets you compute camera pose relative to the tag if you know the tag’s physical size and the camera intrinsics. They are widely used for camera calibration, robot localization, AR markers and many tasks where 2D to 3D reference is useful.
Why AprilTags are useful:
- Robust detection under many viewing angles and lighting conditions.
- Provide direct geometric constraints for pose estimation
- Small payload, easy to print and deploy
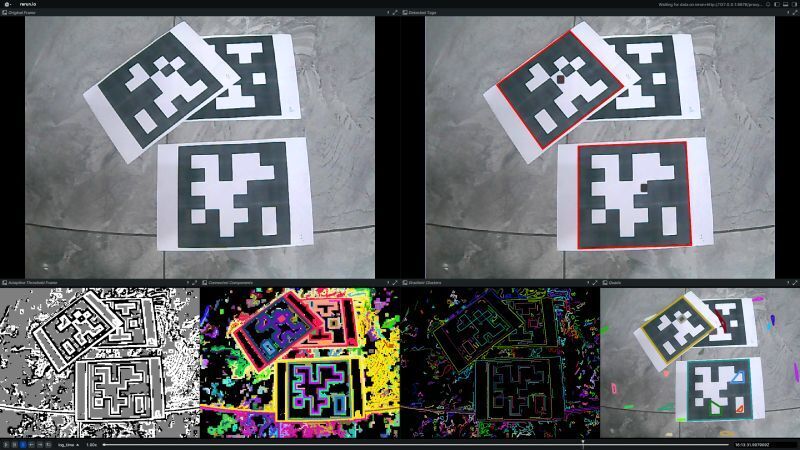
During the first half of the coding period, I primarily worked on creating the kornia-apriltag crate that focuses on AprilTag Detection. It breaks down the entire decoding pipeline in the following steps:
- Adaptive Threshold
- Connected Components (aka Union Find)
- Gradient Clusters
- Quad Fitting
- Tag Decoding
The API of kornia-apriltag is a well documented crate which is easy to use while being super customizable. The following code snippet is the easiest way to use the crate:
use kornia_apriltag::*;
let config = DecodeTagsConfig::all();
let mut decoder = AprilTagDecoder::new(config, image_size)?;
let detections = decoder.decode(&img)?;
// Do whatever you want with the detections, or just plot themBut you can go much further by choosing which Tag Families to consider detection and their individual configs and even replace/customize any step of the pipeline as all of the functions are well-documented and exposed publicly.
You can find a complete example in examples/apriltag
PRs associated: #380, #384, #406, #410, #419, #420, #429, #433, #435, #436, #438, #440, #444, #458
Resources
- AprilRobotics/apriltag
- powei-lin/aprilgrid-rs
- https://april.eecs.umich.edu/papers/details.php?name=olson2011tags
- https://april.eecs.umich.edu/papers/details.php?name=wang2016iros
- https://april.eecs.umich.edu/papers/details.php?name=krogius2019iros
ORB Detectors
ORB (Oriented FAST and Rotated BRIEF) is a feature detection and description algorithm optimized for speed and robustness. It combines FAST for keypoint detection, orientation assignment for each keypoint, and BRIEF-like binary descriptors that are rotation-aware. ORB is widely used for feature matching, visual odometry, and as input to SLAM pipelines.

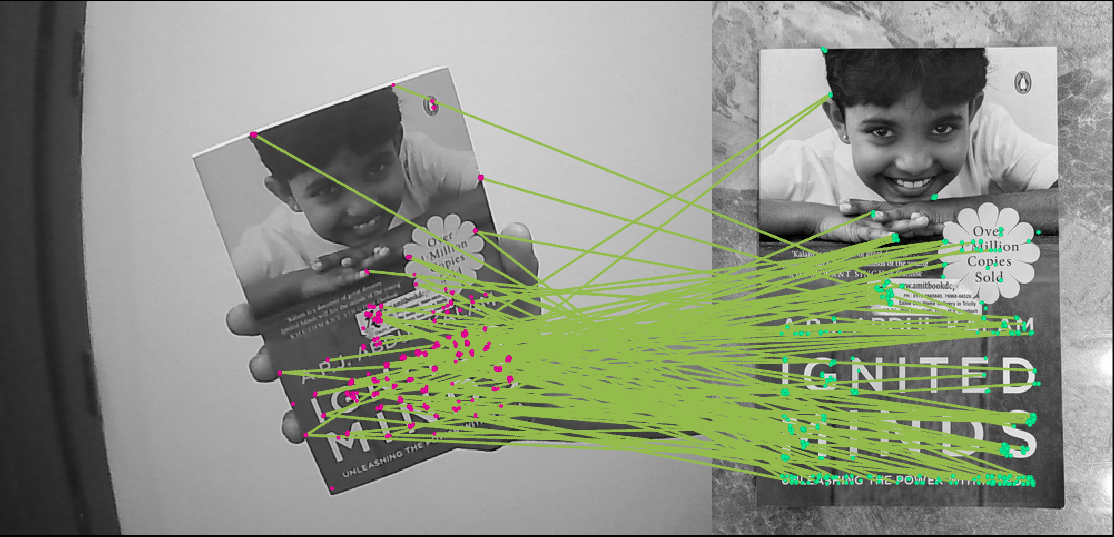
The second half of the coding period, I implemented an ORB Detector in the kornia-imgproc crate.
use kornia_imgproc::features::*;
let mut orb_detector = OrbDetector::new(OrbDetectorConfig::default(), image.size())?;
orb_detector.detect(&image)?;
let (descriptors, _) = orb_detector.extract(&image)?;
let Detection { keypoints, .. } = orb_detector.get_detection();The matching of the descriptors is also as simple as the detection:
// Your detection logic
let matches = match_descriptors(&first_descriptors, &second_descriptors, None, true, None);
// let's plot them
let mut coords = Vec::new();
for &(i1, i2) in matches.iter() {
let kp1 = &keypoints1[i1];
let kp2 = &keypoints2[i2];
coords.push([kp1, kp2]);
}
// Your plotting logicPRs associated: #457 (UNDER REVIEW)
Resources
FAST Corner Detector
FAST (Features from Accelerated Segment Test) is a high-speed corner detector. For each candidate pixel, FAST compares the intensities of a circle of surrounding pixels to the center pixel. If a contiguous arc of pixels is all brighter (or all darker) than the center by a threshold, then the pixel is classified as a corner.

During the second half of the coding period while implementing ORB Detector I needed complete implementation of FAST corner detector. So, I implemented a newer complete version of FAST Corner detector in kornia-imgproc crate.
use kornia_imgproc::features::FastDetector;
let mut fast_detector = FastDetector::new(image_size, threshold, arc_length, min_distance)?;
fast_detector.compute_corner_response(&image)?;
let keypoints = fast_detector.extract_keypoints()?;
// Go ahead plot the keypointsYou can find a complete example using FAST Corner Detector in examples/fast_detector.
PRs associated: #460 (UNDER REVIEW)
Resources
Timeline
The following is the list of all the PR/Issue(s) created by me during the GSoC Coding Period.
Goal Classification
AprilTagORB DetectorFAST DetectorOther
| Date | Title | Type | Goal | Link | |
|---|---|---|---|---|---|
| 1. | Jun 2 | Add kornia-apriltag crate | PR | AprilTag | #380 |
| 2. | Jun 2 | Use std::hint::black_box instead of criterion::black_box because it’s deprecated | PR | Other | #381 |
| 3. | Jun 2 | Update ONNX example to use ort 2.0.0-rc.10 | PR | Other | #382 |
| 4. | Jun 4 | Add Adaptive Threshold Binary functions | PR | AprilTag | #384 |
| 5. | Jun 8 | Fix kornia-io docs.rs not building | PR | Other | #388 |
| 6. | Jun 20 | Add Connected Components for AprilTag detection | PR | AprilTag | #406 |
| 7. | Jun 21 | Safe Implementation of Image TileIterator yielding borrowed slices | Issue | AprilTag | #408 |
| 8. | Jun 21 | Implement Zero-copy Image conversion in kornia-py | Issue | Other | #409 |
| 9. | Jun 23 | Add gradient cluster detection | PR | AprilTag | #410 |
| 10. | Jun 26 | Replace clippy-action with direct cargo clippy command | PR | Other | #412 |
| 11. | Jun 29 | Add Quad Fitting | PR | AprilTag | #419 |
| 12. | Jul 1 | Add AprilTag Decoding | PR | AprilTag | #420 |
| 13. | Jul 5 | Remove license-file from smol_vlm example | PR | Other | #424 |
| 14. | Jul 10 | Add support for multiple AprilTag Families | PR | AprilTag | #429 |
| 15. | Jul 16 | Add TagFamilyKind::all method and use it in DecodeTagsConfig | PR | AprilTag | #433 |
| 16. | Jul 18 | Reset sharpening buffer for every Quad | PR | AprilTag | #435 |
| 17. | Jul 18 | Add AprilTag detection example | PR | AprilTag | #436 |
| 18. | Jul 19 | Add AprilTag Benchmark | PR | AprilTag | #438 |
| 19. | Jul 22 | Update apriltag-imgs submodule URL | PR | AprilTag | #440 |
| 20. | Aug 2 | Add Image downscaling support in AprilTag Detection | PR | AprilTag | #444 |
| 21. | Aug 27 | Implement ORB Detector | PR | ORB Detector | #457 |
| 22. | Aug 28 | Add benchmark aprilgrid-rs | PR | AprilTag | #458 |
| 23. | Aug 29 | Implement newer FAST Corner Detector | PR | FAST Detector | #460 |
| 24. | Aug 30 | Add Gaussian Blur support for u8 images | Issue | Other | #461 |
| 25. | Aug 30 | Add HarrisResponse support for u8 images | Issue | Other | #462 |
Challenges faced
-
My university end-term exams overlapped with the first half of the coding period, and I initially expected this to limit my time. In practice, I became more interested in AprilTags and allocated increasing effort to the project.
-
Since
kornia-rsis a low-level Computer Vision library, I need to understand the algorithms/detectors that I implemented well. But the issue was that I was in my 2nd semester and core computer science stuff starts from 3rd semester in my university. Luckily I understood the papers well and understood the code of existing implementations which made it slightly easier.
Learning Outcomes
I learned a lot during these 3 months and had a lot of new experiences. Prior to this, I had not worked in a team; my experience was primarily solo projects and occasional open-source contributions. But during this time, we had weekly sync and regular conversation of what and how to do the next thing. It was truly a wonderful experience.